



Nächste Seite: PERFORMANZMASS
Aufwärts: ARCHITEKTUR
Vorherige Seite: SUBZIELARCHITEKTUR 1
Inhalt
Ein Nachteil der
Subzielarchitektur 1 besteht darin, daß die Anzahl der
Subziele pro Problem als konstant angenommen wird.
In typischen Umgebungen ist diese Annahme unrealistisch.
Im allgemeinen bräuchte ein System basierend auf
Subzielarchitektur 1 eine ganze Reihe von Subzielgeneratoren:
Einen für Probleme, die nur ein Subziel erfordern, einen
weiteren für Probleme, die zwei Subziele erfordern, und so fort.
Subzielarchitektur 2 hingegen
gestattet ein und demselben Subzielgenerator  , verschieden
lange Sequenzen von Subzielen zu produzieren. Dies wird erreicht,
indem man ' Ausgabe wie folgt auf die eigene Eingabe rückkoppelt:
, verschieden
lange Sequenzen von Subzielen zu produzieren. Dies wird erreicht,
indem man ' Ausgabe wie folgt auf die eigene Eingabe rückkoppelt:
Bei einer gegebenen
durch ein Start/Ziel-Paar
 spezifizierten Aufgabe
spezifizierten Aufgabe  ist ' Eingabevektor
zum 1. Iterationsschritt gleich
ist ' Eingabevektor
zum 1. Iterationsschritt gleich
 . ' Ausgabevektor ist
. ' Ausgabevektor ist  .
.
Beim Iterationsschritt
 wird ' Eingabevektor zu
wird ' Eingabevektor zu
 , die Ausgabe wird zu
, die Ausgabe wird zu
 . Zur Berechnung der Aktivation
. Zur Berechnung der Aktivation  des
des
 -ten Nichteingabeknotens in
zum Iterationsschritt
-ten Nichteingabeknotens in
zum Iterationsschritt  schreiben wir
schreiben wir
 |
(4.7) |
wobei  wie üblich eine differenzierbare Aktivierungsfunktion
darstellt.
wie üblich eine differenzierbare Aktivierungsfunktion
darstellt.
Wieder verwenden wir das Evaluatormodul  zur Berechnung von
zur Berechnung von
 , aus
, aus
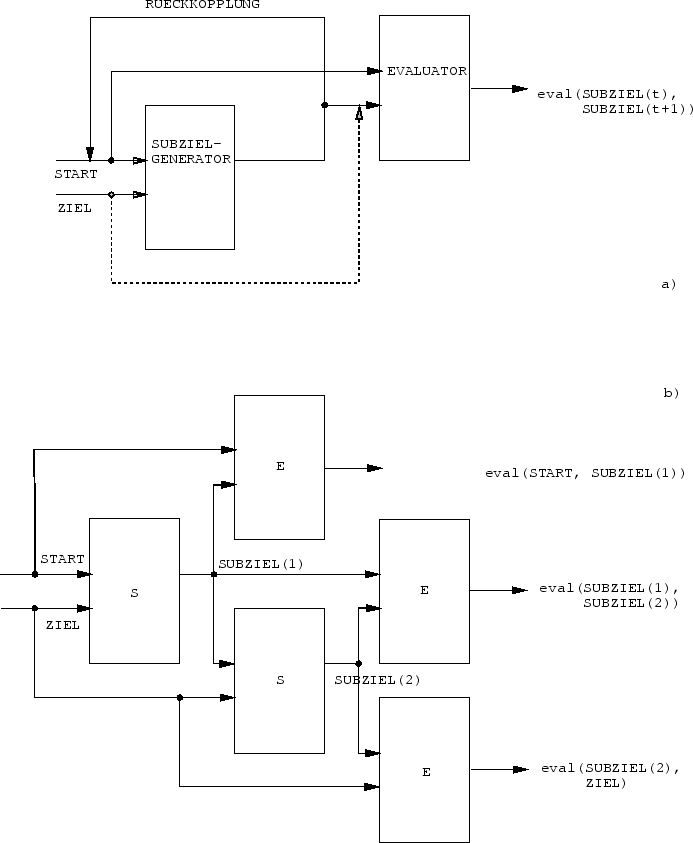
 . Die Architektur hat sich aber nun gemäß
Abbildung 4.4a geändert. Abbildung 4.4b zeigt dieselbe Architektur
im zeitlich entfalteten Zustand (nach der Generierung dreier
sukzessiver Subziele).
. Die Architektur hat sich aber nun gemäß
Abbildung 4.4a geändert. Abbildung 4.4b zeigt dieselbe Architektur
im zeitlich entfalteten Zustand (nach der Generierung dreier
sukzessiver Subziele).
Abbildung:
(a) Die Ausgabe des rekurrenten Subzielgenerators
zur Zeit wird auf seinen eigenen START-Eingang
rückgekoppelt. produziert demnach eine
zeitlich gedehnte Sequenz von Subzielen.
Der Evaluator prophezeiht die für zwei
aufeinanderfolgende Subziele zu erwartenden Kosten.
Die gestrichelte
Linie zeigt an, daß am Ende der Subzielsequenz
das eigentliche ZIEL als Eingabe erhalten muß.
(b) zeigt die rekurrente Architektur (a) im `zeitlich
entfalteten' Zustand (für 2 Subziele).
 |
Nächste Seite: PERFORMANZMASS
Aufwärts: ARCHITEKTUR
Vorherige Seite: SUBZIELARCHITEKTUR 1
Inhalt
Juergen Schmidhuber
2003-02-20
Related links in English: Recurrent networks - Fast weights - Subgoal learning - Reinforcement learning and POMDPs - Unsupervised learning and ICA - Metalearning and learning to learn
Deutsche Heimseite