Ein Unterprogramm ![]() sei eine Sequenz von Aktionen,
die von einem Startzustand
sei eine Sequenz von Aktionen,
die von einem Startzustand ![]() zu einem Zielzustand
zu einem Zielzustand ![]() führen. Sowohl
führen. Sowohl ![]() als auch
als auch ![]() seien hier reelle Vektoren,
die einen möglichen Zustand der Umgebung repräsentieren.
seien hier reelle Vektoren,
die einen möglichen Zustand der Umgebung repräsentieren.
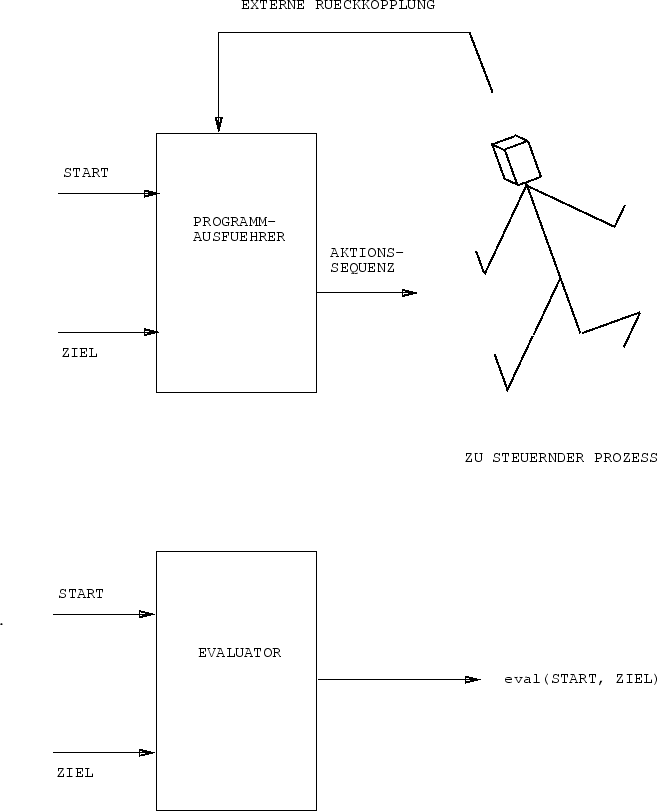
Eines der drei an unserer Gesamtarchitektur beteiligten Module
ist der Programmausführer ![]() .
.
![]() kann ein
neuronales Netzwerk sein, muß aber nicht.
(Tatsächlich stellt
kann ein
neuronales Netzwerk sein, muß aber nicht.
(Tatsächlich stellt ![]() im
Kontext der Subzielgenerierung die unbedeutendste Komponente dar.)
Zum Zeitpunkt
im
Kontext der Subzielgenerierung die unbedeutendste Komponente dar.)
Zum Zeitpunkt ![]() der Ausführung des
der Ausführung des ![]() -ten Programms produziert
-ten Programms produziert
![]() einen Ausgabevektor
einen Ausgabevektor ![]() und
nimmt einen Eingabevektor
und
nimmt einen Eingabevektor ![]() aus der Umgebung wahr.
Es sei
aus der Umgebung wahr.
Es sei
![]() kann als Aktivationsmuster angesehen werden, welches den
finalen gewünschten Zustand beschreibt.
kann als Aktivationsmuster angesehen werden, welches den
finalen gewünschten Zustand beschreibt.
![]() läßt sich als `Programmname' betrachten.
Wir nehmen an, daß
läßt sich als `Programmname' betrachten.
Wir nehmen an, daß ![]() bereits eine Anzahl von Programmen
korrekt ausführen kann.
Diese Programme mögen durch einen
konventionellen Lernalgorithmus oder durch eine rekursive
Anwendung des unten zu beschreibenden Verfahrens erworben worden sein.
bereits eine Anzahl von Programmen
korrekt ausführen kann.
Diese Programme mögen durch einen
konventionellen Lernalgorithmus oder durch eine rekursive
Anwendung des unten zu beschreibenden Verfahrens erworben worden sein.
Abbildung 4.2 zeigt ein zweites Modul, das Evaluatormodul ![]() ,
dessen Eingabe erneut
die Konkatenation
,
dessen Eingabe erneut
die Konkatenation ![]() eines einen Startzustand
repräsentierenden Vektors
eines einen Startzustand
repräsentierenden Vektors ![]() und
eines einen Zielzustand
repräsentierenden Vektors
und
eines einen Zielzustand
repräsentierenden Vektors ![]() ist.
ist.
![]() 's eindimensionale Ausgabe
's eindimensionale Ausgabe
![]() wird als
Vorhersage der Kosten (
wird als
Vorhersage der Kosten ( ![]() negatives
`Reinforcement')
interpretiert,
die mit dem entsprechenden von
negatives
`Reinforcement')
interpretiert,
die mit dem entsprechenden von
![]() nach
nach ![]() führenden Programm assoziiert sind.
Eine Evaluation von 0 bedeutet minimale zu erwartende Kosten.
führenden Programm assoziiert sind.
Eine Evaluation von 0 bedeutet minimale zu erwartende Kosten.
 |
![]() stellt ein Modell der gegewärtigen Fähigkeiten
des Programmausführers dar. Wir wollen auch
stellt ein Modell der gegewärtigen Fähigkeiten
des Programmausführers dar. Wir wollen auch ![]() hier nicht detailliert
spezifizieren -
hier nicht detailliert
spezifizieren - ![]() mag sowohl ein
neuronales Netzwerk mit bezüglich der Eingabe differenzierbaren
Ausgaben [106]
als auch irgendeine andere differenzierbare Abbildung
sein.
mag sowohl ein
neuronales Netzwerk mit bezüglich der Eingabe differenzierbaren
Ausgaben [106]
als auch irgendeine andere differenzierbare Abbildung
sein.
Das für uns interessanteste der drei Module ist der
adaptive Subzielgenerator ![]() .
. ![]() soll lernen,
neue Start-Ziel Kombinationen durch eine Liste geeigneter
aufeinanderfolgender
Subziele zu beantworten.
soll lernen,
neue Start-Ziel Kombinationen durch eine Liste geeigneter
aufeinanderfolgender
Subziele zu beantworten.
Das ![]() -te vektorwertige
Subziel der Subzielliste (
-te vektorwertige
Subziel der Subzielliste (
![]() )
heiße
)
heiße ![]() , die
, die ![]() -te
Komponente des Vektors
-te
Komponente des Vektors ![]() sei wie stets mit
sei wie stets mit ![]() bezeichnet.
Alle
bezeichnet.
Alle ![]() haben gleiche Dimension
haben gleiche Dimension
![]() Es sei
Es sei
![]() .
Im Idealfall sollte die Subzielliste
.
Im Idealfall sollte die Subzielliste
![]() nach der Lernphase
folgende Bedingung erfüllen:
nach der Lernphase
folgende Bedingung erfüllen:
| (4.6) |