



Nächste Seite: ZIELFUNKTIONSKOMBINATIONEN
Aufwärts: PERFORMANZMASSE FÜR DIE DREI
Vorherige Seite: EINE ZIELFUNKTION FÜR DAS
Inhalt
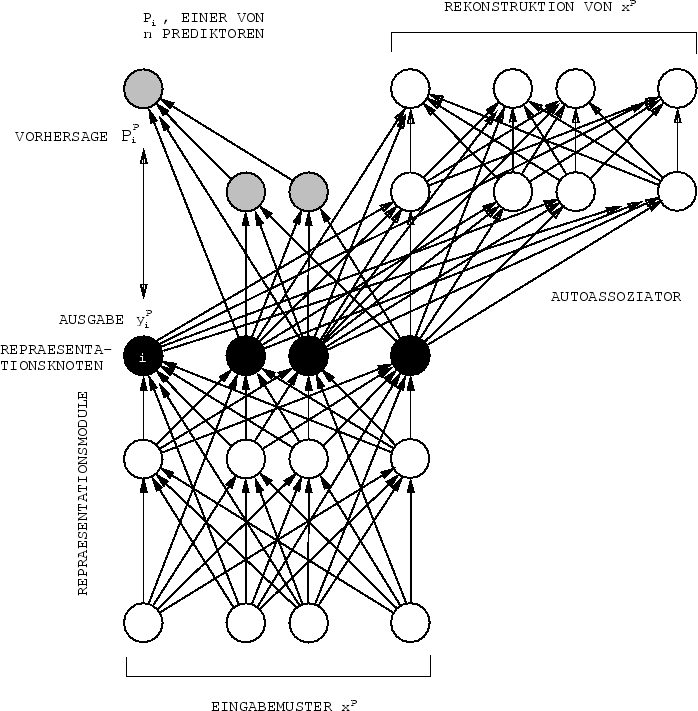
Um den in den Repräsentationsknoten dargestellten Code
der Umgebungseingaben
reversibel zu machen, läßt sich folgende altbekannte Methode
verwenden:
Für ein anliegendes Muster  erhält ein
Rekonstruktionsmodul (ein azyklisches BP-Netzwerk)
die Konkatenation aller
erhält ein
Rekonstruktionsmodul (ein azyklisches BP-Netzwerk)
die Konkatenation aller
 als Eingabe
und wird daraufhin trainiert, seinen Ausgabevektor
als Eingabe
und wird daraufhin trainiert, seinen Ausgabevektor  dem anliegenden Eingabevektor anzugleichen.
Die zugrundeliegende Struktur ist die eines Autoassoziators
(siehe Abbildung 6.2).
Die zu minimierende Zielfunktion ist
dem anliegenden Eingabevektor anzugleichen.
Die zugrundeliegende Struktur ist die eines Autoassoziators
(siehe Abbildung 6.2).
Die zu minimierende Zielfunktion ist
 |
(6.5) |
Abbildung:
Wie Abbildung 6.1, mit zusätzlichem Autoassoziator zur
Erzielung reversibler Codes in den Repräsentationsknoten.
Im Text wird gezeigt, daß der Autoassoziator nicht
unbedingt nötig ist.
 |
Juergen Schmidhuber
2003-02-20
Related links in English: Recurrent networks - Fast weights - Subgoal learning - Reinforcement learning and POMDPs - Unsupervised learning and ICA - Metalearning and learning to learn
Deutsche Heimseite